Предлагаем ознакомиться с нашими размышлениями на тему определения оптимальных условий работы скользящего электрического контакта
Определение оптимальных условий работы скользящего электрического контакта из условия наименьшего энерговыделения
Вопросам изучения оптимальных условий работы скользящего электрического контакта (например, графитовых щеток) посвящено огромное число исследований. Предложено немалое число теорий, более или менее удачно описывающих какие-то отдельные случаи. Каждый из уважающих себя производителей (и мы здесь не исключение) в обязательном порядке указывает оптимальные, с его точки зрения, условия работы всех своих марок электрощеточных материалов. Во всех проспектах, посвященным электрощеткам, обязательно указываются максимально допустимая линейная скорость коллектора, рекомендуемое нажатие на щетку, допустимая плотность тока, коэффициент трения и падение напряжения на пару щеток. Все производители электрических машин считают, что знают оптимальную температуру на коллекторе и массу других параметров работы скользящего контакта. Однако до сих пор единственным методом выбора электрощеток для вновь создаваемой машины является метод проб и ошибок.
Следует отметить, что попытки определения оптимальных условий работы скользящего электрического контакта из условий наименьшего энерговыделения предпринимались и ранее, например, в работе [1]. Однако примененные автором некорректные допущения не позволили получить результат, применимый на практике. Рассмотрим мощность общего энерговыделения в скользящем электрическом контакте электрической машины W.
W = Wf + WU + Wb + Wk + Wout , где:
Wf - мощность энерговыделения за счет сил трения;
WU - мощность энерговыделения за счет падения напряжения в контакте;
Wb - мощность энерговыделения за счет омического сопротивления щеток;
Wk - мощность энерговыделения за счет омического сопротивления коммутатора (безразлично, контактных колец или коллектора);
Wout - мощность энерговыделения за счет внешних источников.
В данной работе мы будем рассматривать случай «номинальной» работы электромашины, для которого задан общий ток I через контакт и соответствующая этому току скорость вращения, а значит, и линейная скорость коммутатора v. Для сетевых генераторов этот режим вообще является единственным. В этом случае мы можем изменять только площадь контакта электрощеток с коммутатором (путем изменения их количества и площади поперечного сечения) и величину нажатия на единичную щетку. Пусть наш скользящий контакт содержит по N щеток положительной и отрицательной полярности сечением S каждая. Мы предполагаем, что плотность тока через все щетки одинакова и равна j=I/(N×S). Тогда:
Wf = 2N×f×P×V = 2N×S×f×p×v = (2I×v×f×p)/j,
где f - коэффициент трения, заметно зависящий как от плотности тока j, так и от удельного нажатия p, т.е. f = f(j;p).
WU = 2ΔU×I, где 2ΔU - падение напряжения на паре щеток, заметно зависящее как от плотности тока j, так и от удельного нажатия p и не зависящее от сечения S, т.е. 2ΔU = 2ΔU(j;p). Для записи третьего члена в уравнении баланса энерговыделения нам придется сделать допущение, что сопротивление щетки в процессе эксплуатации не изменяется. Это предположение имеет смысл потому, что омическое сопротивление тела щетки за счет ее износа уменьшается, в то время, как сопротивление места заделки провода в щетку за счет окисления растет. Также учтем тот технологический факт, что для щеток большинства производителей сопротивления места заделки провода в щетку, сопротивления самого токоподводящего провода и сопротивление тела щетки примерно равны, т.е. примем электросопротивление всей щетки R равным 3Rb - утроенному сопротивлению тела щетки в начальный период эксплуатации. Даже если все эти предположения немного искажают реальность, их вклад в общий дисбаланс невелик в силу того, что энерговыделение за счет омического сопротивления щеток на реальной машине не превышают 5% от общего энерговыделения.
В конечном итоге:
Wb = 2N×i2×R = 6I×i×Rb = 6I×j×S×Rb = 6I×ρ×L×j, где:
i - ток через единичную щетку;
ρ - электросопротивление тела щетки;
L - начальная длина щетки, (Rb = (ρ×L)/S);
N×i = I для параллельного соединения.Для нахождения возможного экстремума W в зависимости от удельного давления p и плотности тoка в щетках j (а это может быть только минимум хотя бы за счет линейной зависимости Wb от плотности тока), нужно продифференцировать W сначала по j, затем по p, и решить совместно систему 2 уравнений с 2 неизвестными:
Очевидно, что Wk и Wout от j и р не зависят, тогда система уравнений примет вид:
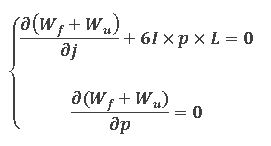
Для численного решения приведенной системы уравнений необходимо иметь зависимости f(j;p) и 2ΔU(j;p) во всем диапазоне допустимых j и р. Для получения этих зависимостей можно использовать стандартный, предусмотренный стандартом ГОСТ Р 51667-2000 короткозамкнутый коллектор КЗК-95 с установленным на него кольцом из материала реального коммутатора. Линейная скорость при получении зависимостей f(j;p) и 2ΔU(j;p) должна быть равна линейной скорости v реальной электрической машины.
Литература:
1. Лившиц П.С. Скользящий контакт электрических машин // Москва: Энергия, 1974 г. - 131 с.
 | Определение оптимальных условий работы скользящего электрического контакта из условия наименьшего энерговыделенияВопросам изучения оптимальных условий работы скользящего электрического контакта (например, графитовых щеток) посвящено огромное число исследований. Предложено немалое число теорий, более или менее удачно описывающих какие-то отдельные случаи. Каждый из уважающих себя производителей (и мы здесь не исключение) в обязательном порядке указывает оптимальные, с его точки зрения, условия работы всех своих марок электрощеточных материалов. Во всех проспектах, посвященным электрощеткам, обязательно указываются максимально допустимая линейная скорость коллектора, рекомендуемое нажатие на щетку, допустимая плотность тока, коэффициент трения и падение напряжения на пару щеток. Все производители электрических машин считают, что знают оптимальную температуру на коллекторе и массу других параметров работы скользящего контакта. Однако до сих пор единственным методом выбора электрощеток для вновь создаваемой машины является метод проб и ошибок. |




