We offer you to read our thought on the determination of the optimum sliding electric contact operating conditions based on minimum energy release conditions
A huge amount of research has been devoted to issues related to optimum working conditions of sliding electric contacts (e.g. carbon brushes). A considerable number of theories, has been put forward, more or less successfully describing some individual cases. Every self-respecting manufacturer (and we are no exception) shall certainly indicate the operating conditions of all own brands of carbon brush materials which he sees optimal. All the brochures dedicated to carbon brushes by all means specify the maximum permissible collector linear speed, the suggested brush pressure, normal current density, the coefficient of friction and contact voltage drop across a pair of brushes. All manufacturers of electric machines consider themselves to know the optimum collector temperature and a lot of other sliding contact parameters. However, up to now the trial and error method has been the only way to select carbon brushes for a newly created machine.
It should be noted that attempts to determine the optimum operating conditions of the electric sliding contact based on minimum energy release conditions have been made in the past, for example, in [1]. However, the author applied the incorrect assumptions which prevented from getting a practical result. Let us consider the total energy release power (W) in a sliding electric contact of the electric W machine.
W = Wf + WU + Wb + Wk + Wout , where:
Wf - power of energy release due to friction;
WU - power of energy release due to contact voltage drop;
Wb - power of energy release due to ohmic resistance of the brush;
Wk - power of energy release due to ohmic resistance of commutator (it doesn't matter whether of slip rings or collector);
Wout - power of energy release from outside sources.
In this article we consider the case of nominal operation of an electric machine, where the parameters of total current I carried through a contact and corresponding rotation speed, thus the linear commutator speed v have been set.It is actually a sole mode in alternators. In this case, we can only change the area of brush contact with the commutator (by changing their number and cross-sectional area) and the amount of pressure exerted on a single carbon brush. Let our sliding contact contain N number of brushes, both of positive and negative polarity, each with cross-sectional area S. We assume that the current density through all brushes is the same and is equal to j=I/N×S. Then:
Wf = 2N×f×P×V = 2N×S×f×p×v = (2I×v×f×p)/j,
where: f - coefficient of friction. It depends noticeably on both current density j, and unit pressure p, i.e. f = f(j;p).
WU = 2ΔU×I,
where: 2ΔU - voltage drop on a pair of brushes.
It depends noticeably on both current density j, and unit pressure p, but is independent of the cross-sectional area S, i.e. 2ΔU=2ΔU(j;p). In order to write a third term in the equation of energy-release balance we have to make the assumption that brush resistance during operation remains unchangeable. This assumption makes sense because the ohmic resistance of the brush body is reduced due to its wear, while the resistance in the point of wire fixation is increased due to oxidation. Also take into account the technological fact that resistance in the point of wire fixation, resistance of the current wire itself and of the brush body in carbon brushes of most manufacturers are approximately equal, i.e. take the electric resistance of the whole brush R equal to 3Rb – three-fold resistance of the brush body at the initial stage of operation. Even if all these assumptions somewhat distort reality, their contribution to the overall imbalance is small due to the fact that energy release of the carbon brush on a real machine does not exceed 5% of the total energy release because of ohmic resistance.
Eventually:
Wb = 2N×i2×R = 6I×i×Rb = 6I×j×S×Rb = 6I×ρ×L×j, where:
i - the current through a single brush;
ρ - electric resistance of the brush body;
L - initial length of the carbon brush, (Rb = (ρ×L)/S);
N×i = I - for parallel connection.In order to find a possible extremum W depending on the unit pressure p and the current density j in brushes (and it can be only a minimum due to linear dependence of power of energy release Wb on current density j), it is necessary to differentiate W first with respect to j, then to p, and resolve a system of 2 equations in 2 unknowns:
It is obvious that Wk and Wout are not dependant on j and p, then the system of equations takes the form:
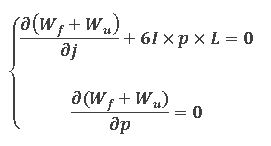
Numerical solution of this system of equations requires dependencies f (j; p) and 2ΔU (j; p) in a whole range of permissible j and p. To derive these dependencies one may use a standard short-circuited collector KZK-95, provided for by GOST R 51667-2000, with an installed ring made of material of a real commutator. When deriving the dependencies f (j; p) and 2ΔU (j; p), the linear speed must be equal to the linear speed v of a real electric machine.
Литература:
1. Лившиц П.С. Скользящий контакт электрических машин // Москва: Энергия, 1974 - 131 p.
 | Determination of the optimum sliding electric contact operating conditions based on minimum energy release conditionsA huge amount of research has been devoted to issues related to optimum working conditions of sliding electric contacts (e.g. carbon brushes). A considerable number of theories, has been put forward, more or less successfully describing some individual cases. Every self-respecting manufacturer (and we are no exception) shall certainly indicate the operating conditions of all own brands of carbon brush materials which he sees optimal.All the brochures dedicated to carbon brushes by all means specify the maximum permissible collector linear speed, the suggested brush pressure, normal current density, the coefficient of friction and contact voltage drop across a pair of brushes. All manufacturers of electric machines consider themselves to know the optimum collector temperature and a lot of other sliding contact parameters. However, up to now the trial and error method has been the only way to select carbon brushes for a newly created machine. |




